Reactive robotic creature
Home
Concept
Photos
Videos
Exhibitions
Press
Contact
A project by Andre Stubbe and Markus Lerner, Berlin University of the Arts.
It was developed on the topic “Lustobjekt” in the Digital Media Class under the supervision of Prof. Joachim Sauter, Prof. Frank Fietzek, Karl Heinz Jeron & Ralph Ammer Deutsch | English
Concept
Photos
Videos
Exhibitions
Press
Contact
A project by Andre Stubbe and Markus Lerner, Berlin University of the Arts.
It was developed on the topic “Lustobjekt” in the Digital Media Class under the supervision of Prof. Joachim Sauter, Prof. Frank Fietzek, Karl Heinz Jeron & Ralph Ammer Deutsch | English
Hardware setup

Hardware
The body consists of three limbs, fibreglass pipes, connected by joints. Four servo motors control these limbs over wires and pulleys, three for the joint movements and one for the vertical rotation. The head, the uppermost limb, carries 5 photo sensors used as eyes for brightness and simple motion recognition. All limbs have capacitory sensors that react to human body contact.
Two BX-24 mircocontrollers are used for input and controlling of the motors. The controllers are conntected to the serial ports of a PC, where all calculations are made by special Java software.
Two BX-24 mircocontrollers are used for input and controlling of the motors. The controllers are conntected to the serial ports of a PC, where all calculations are made by special Java software.
Software screenshots
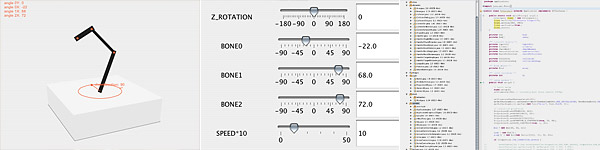
Software
The software is specifically written in Java and does the main part of all calculations. The brightness sensors and capacitive touch sensors are read over the microcontrollers and evaluated by Java. A complex mind and behaviour system provides the manifold reactions. Inverse and forward kinematics are used to realize the movements. The calculated values are again sent to servos by the microcontrollers.
List of used parts
– 4 Futaba-servos
– 3x Axial ball bearing
– Twisted cord
– Cogwheels
– 2x BX-24 microcontrollers
– 1x PC-Laptop
– 2x Serial cables
– Fiber glass tubes
– MDF (medium density fibreboard)
– A bunch of cables
– 5x Photo sensors
– 2x Capacitive sensors
– 3x Axial ball bearing
– Twisted cord
– Cogwheels
– 2x BX-24 microcontrollers
– 1x PC-Laptop
– 2x Serial cables
– Fiber glass tubes
– MDF (medium density fibreboard)
– A bunch of cables
– 5x Photo sensors
– 2x Capacitive sensors
Documentation of work progress
First ideas
Second ideas
Still on fire
Philosophical conflict
Mechanical tests
Behavior ideas
Second ideas
Still on fire
Philosophical conflict
Mechanical tests
Behavior ideas