Reactive robotic creature
Home
Konzept
Photos
Videos
Ausstellungen
Presse
Kontakt
A project by Andre Stubbe and Markus Lerner, Berlin University of the Arts.
Es entstand zum Thema „Lustobjekt“ in der Klasse Gestalten mit digitalen Medien unter der Beratung von Prof. Joachim Sauter, Prof. Frank Fietzek, Karl Heinz Jeron & Ralph Ammer Deutsch | English
Konzept
Photos
Videos
Ausstellungen
Presse
Kontakt
A project by Andre Stubbe and Markus Lerner, Berlin University of the Arts.
Es entstand zum Thema „Lustobjekt“ in der Klasse Gestalten mit digitalen Medien unter der Beratung von Prof. Joachim Sauter, Prof. Frank Fietzek, Karl Heinz Jeron & Ralph Ammer Deutsch | English
Hardwareaufbau

Hardware
Der Körper besteht aus drei Stäben, die über Gelenke verbunden sind. Die Stäbe werden über Seilzüge von vier Servomotoren gesteuert, drei für die Gelenkbewegungen sowie einer für die vertikale Rotation. Der Kopf, der Endstab, trägt 5 Photosensoren, die als Augen zur Erkennung von Helligkeit und Bewegung genutzt werden. Alle Stäbe sind mit kapazitiven Sensoren ausgestattet, die auf Berührung reagieren.
Die Auswertung und Steuerung erfolgt über zwei BX-24 Microcontroller, die wiederrum über die serielle Schnittstelle mit einem Rechner verbunden sind, der mittels individuell geschriebener Java Software die zentrale Kontrolle übernimmt.
Die Auswertung und Steuerung erfolgt über zwei BX-24 Microcontroller, die wiederrum über die serielle Schnittstelle mit einem Rechner verbunden sind, der mittels individuell geschriebener Java Software die zentrale Kontrolle übernimmt.
Software screenshots
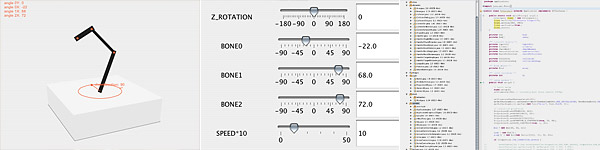
Software
Die Software ist indiviell in Java geschrieben und übernimmt den Hauptanteil der Berechnungen. Die Helligkeits- und Kapazitiven Berührungssensoren werden über die Mikrokontroller ausgelesen und in Java ausgewertet. Ein komplexes Mind- und Verhaltenssystem bewerkstelligt das facettenreiche Verhalten. Inverse und Vorwärtskinematik werden verwendet, um die Bewegungen auszuführen. Die berechneten Werte werden wiederum von den Microcontrollern auf die Servos übertragen.
Liste der verwendeten Teile
– 4 Futaba-Servos
– 3 Axiale Kugellager
– Geflochtene Schnur
– Zahnräder
– 2 BX-24 Microcontroller
– 1 PC-Laptop
– 2 Serielle Kabel
– Glassfaserrohre
– MDF (Mitteldichte Faserplatte)
– Viele Kabel
– 5 Photosensoren
– 2 Kapazitive Sensoren
– 3 Axiale Kugellager
– Geflochtene Schnur
– Zahnräder
– 2 BX-24 Microcontroller
– 1 PC-Laptop
– 2 Serielle Kabel
– Glassfaserrohre
– MDF (Mitteldichte Faserplatte)
– Viele Kabel
– 5 Photosensoren
– 2 Kapazitive Sensoren
Dokumentation des Arbeitsprozesses
(auf english) First ideas
Second ideas
Still on fire
Philosophical conflict
Mechanical tests
Behavior ideas
(auf english) First ideas
Second ideas
Still on fire
Philosophical conflict
Mechanical tests
Behavior ideas